Cómo funciona un Motor Eléctrico en la industria

La idea detrás de un motor eléctrico es sorprendentemente sencilla: tú “alimentas” el equipo con electricidad y, como resultado, un eje (una varilla metálica conectada al rotor) empieza a girar.
Ese giro es el que mueve una bomba, un ventilador, una cinta transportadora o cualquier máquina que necesite rotación para trabajar.
La pregunta clave es: ¿cómo pasa de electricidad a movimiento? Es decir, ¿qué ocurre dentro del motor eléctrico para que algo invisible como la corriente termine convirtiéndose en un giro real, continuo y con fuerza?
Para entenderlo bien, vale la pena hacer un pequeño viaje al pasado, casi 200 años atrás, cuando se descubrió y se empezó a dominar el fenómeno que lo hace posible: el electromagnetismo.
Desde ahí, todo encaja de forma bastante lógica.
A continuación, vamos a ir respondiendo estas dudas paso a paso, con ejemplos simples y explicaciones desde cero, para que te quede claro cómo funciona un motor eléctrico y por qué es una pieza tan importante en el mantenimiento industrial.
1. ¿Qué es un motor eléctrico?
Un motor eléctrico es una máquina electromecánica cuya función es convertir energía eléctrica en energía mecánica, es decir, en movimiento.
Dicho de forma muy simple: es un dispositivo que, al recibir electricidad, genera una fuerza de giro capaz de mover un eje.
Y ese giro es justo lo que permite accionar cientos de equipos en casa y, sobre todo, en la industria.
Para que ese giro ocurra, el motor eléctrico se basa en una idea clave: la electricidad puede crear magnetismo.
Cuando la corriente circula por unas bobinas (conductor enrollado), se genera un campo magnético.
Ese campo interactúa con otro campo magnético dentro del motor y produce una fuerza que empuja las partes móviles para que empiecen a girar.
En resumen, el movimiento aparece por la interacción entre campos eléctricos y magnéticos (electromagnetismo), que es la base de su principio de funcionamiento.
Por eso, los motores eléctricos están en todas partes.
Los encuentras en equipos domésticos como aspiradoras, lavavajillas o impresoras, y también en sistemas industriales como bombas de agua, máquinas herramienta, líneas de fabricación, imprentas y muchos otros procesos donde hace falta transformar electricidad en trabajo mecánico de forma eficiente.
En mantenimiento industrial, entender cómo funciona un motor eléctrico es esencial, porque es uno de los componentes más comunes… y también uno de los que más fallos puede provocar si no se revisa bien.
2. ¿Cuándo se inventó el motor eléctrico?
La historia del motor eléctrico empieza a principios del siglo XIX, cuando los científicos descubrieron que electricidad, magnetismo y movimiento están conectados.
A partir de 1820 se observó que una corriente eléctrica podía generar un efecto magnético, y el físico André-Marie Ampère ayudó a explicar y ordenar esas ideas con base científica.
Con ese “puzzle” ya sobre la mesa, llegaron los avances que hicieron posible el motor eléctrico tal como lo entendemos hoy.
Michael Faraday fue clave al demostrar que el magnetismo podía producir movimiento de forma práctica, es decir, convertir electricidad en giro.
Luego, inventores como William Sturgeon y Joseph Henry impulsaron el desarrollo de electroimanes más potentes y eficientes, algo esencial para que los motores ganaran fuerza y pudieran mover máquinas reales.
En resumen: no fue un invento de una sola persona ni de un solo día, sino una evolución paso a paso.
Gracias a esos descubrimientos, el motor eléctrico pasó de ser un experimento de laboratorio a convertirse en una de las tecnologías más importantes de la industria moderna.
3. Funcionamiento de un motor eléctrico
El funcionamiento de un motor eléctrico se entiende mucho mejor si piensas en una idea sencilla: electricidad + magnetismo = movimiento.
Eso es el electromagnetismo, y es la base de casi todos los motores que verás en industria.
Para explicarlo desde cero, hay dos principios físicos muy importantes (relacionados con Ampère y Faraday):
Principio 1 (fuerza sobre un conductor con corriente)
Si por un conductor (un cable) circula corriente y ese conductor está dentro de un campo magnético, aparece una fuerza que lo empuja.
Esa fuerza depende de cómo estén “cruzados” la corriente y el campo magnético: cuanto más perpendicular sea, mayor empuje.
Y si inviertes la corriente o inviertes el campo magnético, la fuerza cambia de sentido.
Principio 2 (tensión por movimiento en un campo magnético)
Si en vez de meter corriente, mueves un conductor dentro de un campo magnético, se genera una diferencia de potencial (una tensión) en sus extremos.
Esto es clave para entender generadores… y también parte del comportamiento de algunos motores.
Ahora, vamos a lo práctico. Cuando una corriente eléctrica circula por un cable, se crea un campo magnético alrededor de ese cable (como si se convirtiera en un “mini imán” mientras pasa la corriente).
Si ese cable está cerca de un imán permanente o de otra bobina que también crea magnetismo, ambos campos magnéticos interactúan.
Seguro que ya lo has visto con imanes: si los acercas, pueden atraerse o repelerse.
En un motor eléctrico pasa algo parecido: el campo magnético “temporal” del cable empuja o atrae al campo magnético “fijo” del imán.
¿El resultado? Aparece un empuje que provoca giro.
Para conseguir un giro continuo (no solo un empujón), el motor usa bobinas colocadas de forma estratégica y un sistema que va cambiando la corriente en el momento adecuado.
Así se mantiene una fuerza de torsión (par motor) sobre el conjunto móvil, haciendo que el eje gire de manera estable y pueda realizar un trabajo útil, como mover una bomba, un ventilador o una cinta transportadora.
En resumen: un motor eléctrico gira porque una corriente eléctrica, al estar dentro de un campo magnético, genera una fuerza que produce par y convierte la electricidad en movimiento mecánico aprovechable.

4. Partes de un motor eléctrico
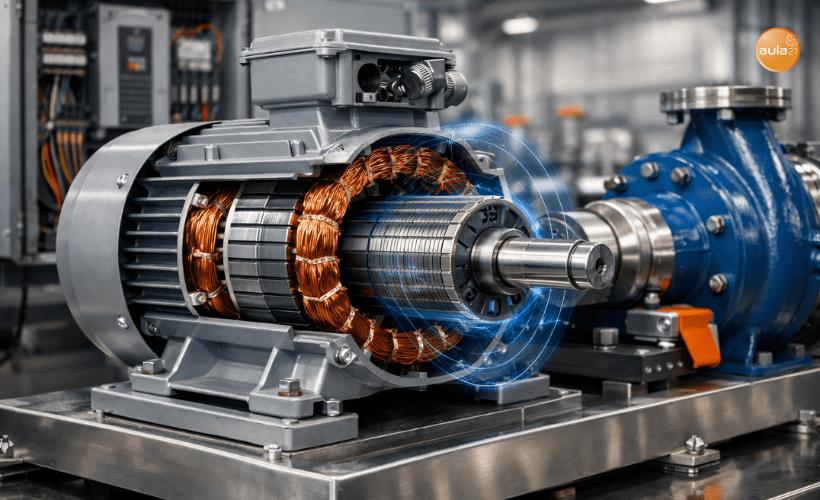
Para entender cómo funciona un motor eléctrico, lo primero es conocer sus dos “protagonistas” principales: estator y rotor.
Piensa en ellos como un “imán fijo” y un “imán que se mueve”, trabajando juntos para generar el giro.
El estator es la parte estática (no se mueve). Está formado por materiales magnéticos y conductores eléctricos (normalmente bobinas) cuya misión es crear un campo magnético de una forma controlada.
Es, por así decirlo, el “escenario” donde ocurre toda la acción.
El rotor, en cambio, es la parte móvil. También incorpora elementos magnéticos y conductores para generar su propio campo magnético o reaccionar al del estator.
Lo importante es que está montado sobre un eje, que es el que transmite el movimiento a la máquina que quieres accionar (por ejemplo, una bomba o un ventilador).
Además, el rotor necesita algún sistema que asegure el comportamiento eléctrico correcto durante el giro.
En algunos motores esto se hace con escobillas y colector (más típico en motores de corriente continua), y en otros no hace falta porque funcionan por inducción o con electrónica de control (muy habitual en motores de corriente alterna).
¿Y qué pasa cuando el motor está funcionando? La corriente eléctrica que llega al motor eléctrico se usa para crear campos magnéticos en el estator y, según el tipo de motor, también en el rotor.
Esos campos se atraen y se repelen, generando un par motor (una fuerza de giro).
Como el rotor es la parte que puede moverse, ese par lo hace girar, y el eje entrega esa energía mecánica al equipo conectado.
Aunque estator y rotor son la base, un motor real incluye más elementos para que el giro sea continuo, estable y seguro, como la carcasa, los rodamientos (para reducir fricción) y el sistema de ventilación (para disipar calor).
Todo eso ayuda a que el motor pueda trabajar durante horas sin dañarse.
Por último, conviene saber que los motores eléctricos pueden funcionar con corriente continua (DC) o con corriente alterna (AC).
Cada tipo tiene ventajas y limitaciones: unos se controlan muy bien en velocidad y par, otros son más robustos y comunes en industria.
Más adelante veremos esas diferencias de forma sencilla para que puedas identificarlos en el día a día del mantenimiento industrial.
5. ¿Cuáles son los tipos de motores eléctricos?
Los motores eléctricos se pueden clasificar de muchas formas, pero la más común (y la más útil para empezar) es según el tipo de alimentación eléctrica: corriente alterna (AC) y corriente continua (DC).
A partir de ahí, aparecen familias y subtipos con comportamientos distintos en velocidad, par, mantenimiento y control.
5.1. Motores de corriente alterna (AC)
Un motor AC transforma la corriente alterna en movimiento.
Dentro de esta familia, los más habituales se agrupan así: motores de inducción (asíncronos), motores síncronos y, como caso especial, los motores lineales (que no giran, sino que se mueven en línea recta).
5.1.1. Motor de inducción (asíncrono)
Es el motor industrial “por excelencia”. Se llama asíncrono porque no gira exactamente a la misma velocidad que el campo magnético generado en el estator: siempre hay un pequeño desfase llamado deslizamiento, que es normal y necesario para que funcione.
Su punto clave es este: el estator crea un campo magnético giratorio y ese campo induce corriente en el rotor (por eso se llama “de inducción”).
Esa corriente inducida genera a su vez magnetismo, y la interacción de campos produce el par que hace girar el eje.
Según el tipo de rotor, se suele dividir en:
- Rotor de jaula de ardilla: el más común. Es robusto, simple y requiere poco mantenimiento. (El “zumbido” o ruidos suelen venir más por vibraciones, ventilación o red eléctrica que por “bloqueo magnético” como tal, aunque el diseño del rotor sí influye en el comportamiento).
- Rotor bobinado (de anillos rozantes): también llamado rotor de fase bobinada. Usa anillos y escobillas para poder conectar resistencias externas en el arranque o control, algo útil en aplicaciones específicas (aunque hoy muchas veces se sustituye por variadores de frecuencia).
Según el número de fases:
- Motor de inducción monofásico: típico en aplicaciones domésticas o pequeñas potencias. Necesita un sistema de arranque (por ejemplo, bobinado auxiliar y condensador) porque con una sola fase no arranca “solo” de manera natural.
- Motor de inducción trifásico: el rey en industria. Arranque más natural, buen rendimiento y excelente relación robustez/precio.
5.1.2. Motor síncrono
En un motor síncrono, la velocidad del rotor se mantiene sincronizada con la frecuencia de la red (y con el número de polos).
Dicho fácil: si la frecuencia se mantiene estable, el motor también mantiene una velocidad muy estable.
Estos motores se usan cuando interesa precisión de velocidad, eficiencia o control avanzado (por ejemplo, con variadores en aplicaciones modernas).
Según el diseño, se encuentran variantes como:
- Síncrono de imanes permanentes (PMSM): muy usado hoy en día por eficiencia y control (especialmente con variadores).
- Síncrono de reluctancia: puede arrancar como asíncrono (dependiendo del diseño) y luego “engancharse” en sincronismo.
- Síncrono de histéresis: menos común, pero existe; destaca por funcionamiento suave.
Nota importante: la idea de “a la frecuencia deseada” puede confundir.
En realidad, la frecuencia viene dada por la alimentación (red o variador) y el motor responde a ella.
5.1.3. Motor lineal (caso especial)
Un motor lineal es, en esencia, un “motor eléctrico desenrollado”: en lugar de generar giro, genera movimiento recto (lineal).
Puede alimentarse con AC y suele ir controlado por electrónica (drivers/servocontrol), sobre todo en automatización, posicionamiento y maquinaria de precisión.
5.2. Motores de corriente continua (DC)
Un motor DC convierte corriente continua en movimiento basándose en el mismo principio base: un conductor con corriente dentro de un campo magnético recibe una fuerza, y esa fuerza crea par de giro.
Aquí conviene separar dos grandes grupos para que la clasificación sea correcta:
5.2.1. Motor DC con escobillas (clásico)
Es el motor “de toda la vida”, con colector (conmutador) y escobillas, que invierten la corriente en el rotor para mantener el giro.
Se clasifica según cómo se alimenta el campo (la parte que crea el magnetismo):
- Excitación independiente (separada): el campo se alimenta con una fuente DC aparte. Permite buen control.
- Autoexcitado (self-excited): el campo se alimenta desde la propia fuente del motor. Dentro de este grupo:
- Motor en serie: campo en serie con el inducido (armadura). Mucho par de arranque, pero cuidado con trabajar “en vacío”.
- Motor shunt o derivación: campo en paralelo. Velocidad más estable.
- Motor compound (compuesto): combina serie + derivación. Puede ser:
- Compound de derivación corta (short shunt)
- Compound de derivación larga (long shunt)
5.2.2. Motor DC sin escobillas (BLDC)
Muy común hoy: ventiladores, electrónica, automatización, vehículos, etc.
Funciona con conmutación electrónica (sin escobillas), y por eso suele durar más y requerir menos mantenimiento.
A nivel práctico, se controla con un driver.
5.3. Otros motores “especiales” muy usados
Además de los anteriores, hay motores que se suelen mencionar aparte porque su forma de control es distinta:
- Motor paso a paso (stepper): gira en “pasos” muy controlables. Muy usado en posicionamiento.
- Servomotores (AC o DC): no es un “tipo único” por construcción, sino un sistema motor + sensor + control, pensado para precisión en velocidad/posición/par.
En resumen: si estás empezando, quédate con esta idea clara: AC = inducción o síncrono (lo más industrial) y DC = con escobillas o sin escobillas (más control y electrónica).
Y a partir de ahí, cada familia tiene subtipos según el rotor, la excitación o el tipo de control.
Te puede interesar: Qué es un servomotor
6. Cómo seleccionar un motor industrial sin improvisar
Elegir un motor industrial no va de “poner uno un poco más potente y listo”.
Va de ajustar el motor al proceso para que trabaje sin sobrecargarse, con margen razonable y con el control que necesitas.
6.1. Empieza por la carga: par, inercia y tipo de proceso
No es lo mismo un ventilador que una cinta.
Un ventilador suele tener comportamiento de par variable (la demanda cambia con la velocidad), mientras que una cinta transportadora suele exigir par más constante, sobre todo en arranque.
Una regla práctica para pensar como mantenimiento/ingeniería:
- Si la carga arranca pesada (transportadores cargados, molinos, trituradores), tu foco es el par de arranque y la estrategia de arranque/control.
- Si la carga varía mucho (bombas por demanda, ventilación por presión), tu foco suele ser variación de velocidad y eficiencia.
7.2. Define el control: fijo, con arrancador suave o con variador
En muchos entornos, el salto de calidad llega cuando el motor eléctrico industrial deja de ser “on/off” y pasa a operar con lógica de proceso: rampas, consignas, alarmas y protección avanzada.
Si hay regulación de caudal, presión o velocidad, el variador de frecuencia suele ser el aliado natural.
Además, la UE regula requisitos de ecodiseño para motores eléctricos y variadores, empujando a soluciones más eficientes según el caso.
7.3. Ten en cuenta el entorno industrial: montaje, protección y temperatura
Aquí es donde muchos fallos nacen “desde el diseño”:
- Montaje (base, bridas, alineación, ventilación disponible).
- Protección frente a polvo/agua según zona.
- Sistema de refrigeración y facilidad para limpiar rejillas/ventiladores.
- Consideraciones especiales en atmósferas con riesgo (donde aplica diseño específico).
7.4. Eficiencia: IE y coste total de propiedad
En planta, el motor se paga dos veces: compra + energía.
Por eso verás referencias a clases de eficiencia IE (IE2, IE3, IE4, IE5), definidas por estándares y regulaciones de mercado.
Más que obsesionarte con “la clase”, úsala como criterio para reducir consumo y calor.
Menos pérdidas suele significar menos calentamiento y, muchas veces, mejor vida útil del aislamiento.
8. Arranque y control en motores industriales: lo que cambia en mantenimiento
Un punto donde el motor industrial se juega la vida es el arranque.
Ahí aparecen picos eléctricos y esfuerzos mecánicos que, si se repiten mal, terminan en rodamientos dañados, acoplamientos castigados o protecciones disparando.
8.1. Formas habituales de arranque (y cuándo tienen sentido)
- Arranque directo (DOL): simple y muy usado, pero exige que la red y la mecánica lo soporten.
- Estrella-triángulo: reduce esfuerzo en el arranque a costa de complejidad y condiciones de aplicación.
- Arrancador suave (soft starter): arranque progresivo, reduce golpes mecánicos y estrés en transmisión.
- Variador de frecuencia (VFD): control total de velocidad y par; además aporta diagnóstico y protección avanzada.
8.2. Variador de frecuencia: ventajas… y nuevas reglas del juego
Con un VFD ganas control, pero también aparecen temas que mantenimiento debe dominar: compatibilidad del motor con alimentación por inversor, calidad de cableado, protecciones y buenas prácticas para evitar calentamientos anómalos o tensiones en el bobinado.
Un consejo de planta: si el motor va con variador y el servicio es duro, asegúrate de que el conjunto (motor + variador + instalación) está pensado como sistema, no como piezas sueltas.
9. Placa de características en motores industriales: tu “DNI” del motor
La placa no está para decorar. En motores industriales, leerla bien te evita errores típicos de sustitución, ajustes incorrectos de relés o variadores y diagnósticos a ciegas.
En una placa solemos encontrar datos como tensión, corriente, frecuencia, potencia, velocidad nominal, factor de potencia, eficiencia, tipo de servicio y referencias de aislamiento/protección.
Cada campo cuenta porque define cómo debe operar ese motor eléctrico industrial.
9.1. Checklist rápido de placa (pensado para mantenimiento)
- Tensión y frecuencia: imprescindible para no montar un motor “casi igual” que luego calienta o pierde par.
- Corriente nominal: base para ajustar protecciones y detectar sobrecargas reales.
- RPM nominal: clave para procesos sensibles a velocidad.
- Servicio (duty): no es lo mismo trabajo continuo que intermitente.
- Eficiencia / clase IE: impacto directo en consumo y temperatura.

10. Mantenimiento de motores industriales: lo que de verdad reduce paradas
El mantenimiento de motores industriales suele fallar por dos extremos: o se hace “por calendario” sin criterio, o se deja a la suerte hasta que salta una alarma.
El punto profesional está en combinar preventivo con predictivo, y priorizar por criticidad.
10.1. Preventivo que sí compensa
- Limpieza de rejillas y ventilación (el calor es enemigo directo del aislamiento).
- Revisión de aprietes y conexiones (muchos problemas eléctricos empiezan ahí).
- Inspección de acoplamientos y alineación (reduce vibración y carga en rodamientos).
- Lubricación de rodamientos según condiciones reales de trabajo (ni por exceso ni por defecto).
10.2. Predictivo: pasar de “reaccionar” a “anticipar”
En una planta moderna, el motor industrial se vigila con señales que hablan antes de romper:
- Tendencias de vibración (desequilibrio, desalineación, holguras).
- Termografía (puntos calientes en bornes, contactos, rodamientos).
- Pruebas de aislamiento y condición del bobinado cuando toca.
- Señales eléctricas (corriente, desequilibrio, eventos) especialmente si hay variador.
10.3. Mini-caso práctico (muy típico)
Una bomba empieza a “sonar” distinto y sube la temperatura de rodamientos.
Si solo cambias el rodamiento, puede volver a fallar.
Cuando revisas alineación y base, descubres una pata coja o una deformación por tensiones de tubería.
Corregir la causa raíz suele valer más que cambiar piezas.
11. Fallos comunes en motores industriales y diagnóstico rápido
En el día a día, la mayoría de averías se repiten. Lo importante es reconocer el patrón y atacar primero lo más probable.
| Síntoma | Causas típicas | Qué comprobar primero |
|---|---|---|
| Motor calienta más de lo normal | Sobrecarga, mala ventilación, tensión incorrecta, armónicos por VFD | Ventilación, carga real del equipo, ajustes del variador/protecciones |
| Vibración elevada | Desalineación, desequilibrio, base floja, rodamientos | Base/anclajes, alineación, estado de acoplamiento, rodamientos |
| Disparos de protección | Sobrecarga, falta de fase, conexiones flojas, ajustes mal parametrizados | Bornes, protecciones, consumo, estado de red |
| Ruido metálico o “ronroneo” | Rodamientos, holguras, ventilador tocando carcasa | Rodamientos, ventilación, juego mecánico |
| Pérdida de par o arranque débil | Caída de tensión, error de arranque, variador mal ajustado | Tensión en bornes, modo de arranque, parámetros VFD |
Este enfoque es muy “de planta”: primero descartas instalación y proceso, luego te vas al motor.

12. Motores industriales e Industria 4.0: del motor “mudo” al activo conectado
Un motor industrial no tiene por qué ser una caja negra.
Hoy, entre variadores inteligentes y sensórica accesible, podemos convertirlo en una fuente de datos útil para fiabilidad, energía y planificación.
Un flujo típico OT/IT que funciona:
- El motor (o su variador) entrega señales: corriente, estado, alarmas, temperatura estimada, horas.
- El PLC/SCADA consolida y contextualiza con el proceso.
- Se envía a un CMMS/EAM para generar avisos y órdenes de trabajo por condición.
- Con histórico, mejoras criticidad, repuestos y estrategias de mantenimiento.
Aquí el objetivo no es “digitalizar por moda”, sino reducir paradas, mejorar disponibilidad y tomar decisiones con evidencias.
Conclusiones finales
Si quieres que un motor industrial sea fiable, no basta con que “gire”. Debe estar bien elegido para la carga, bien instalado y bien protegido. Ahí es donde se ganan (o se pierden) horas de disponibilidad.
Los motores industriales funcionan con un principio simple —electromagnetismo—, pero en planta la complejidad viene de todo lo que los rodea: arrancadores, variadores, ambiente, transmisión mecánica y hábitos de mantenimiento.
Cuando combinamos una selección correcta, un mantenimiento preventivo con sentido y un predictivo basado en condición, el motor eléctrico industrial deja de ser una fuente de averías y se convierte en un activo estable del proceso.
Y si además lo conectamos con criterio (OT/IT), pasamos de “apagar fuegos” a gestionar fiabilidad: menos paradas, menos urgencias y mejores decisiones técnicas.
FAQs rápidas sobre motores industriales
1) ¿Motor industrial y motor eléctrico son lo mismo?
Un motor industrial suele ser un motor eléctrico diseñado para servicio duro: continuidad, entorno exigente y facilidad de mantenimiento.
2) ¿Qué motor es más común en industria?
El más habitual es el motor de inducción trifásico por robustez, coste y disponibilidad.
3) ¿Cuándo merece la pena usar variador de frecuencia?
Cuando necesitas regular velocidad/par, suavizar arranques o adaptar el consumo a la demanda del proceso.
4) ¿Por qué se queman bobinados en motores industriales?
Normalmente por calor acumulado: sobrecarga, mala ventilación, tensión incorrecta o problemas de instalación/control.
5) ¿Qué provoca más fallos: la parte eléctrica o la mecánica?
En muchas plantas, los rodamientos y problemas mecánicos (alineación, vibración, contaminación) dan más guerra que el bobinado.
6) ¿Qué significa IE2, IE3, IE4 en un motor industrial?
Son clases de eficiencia energética (IE). Ayudan a comparar motores y cumplir requisitos de mercado/regulación.